Products
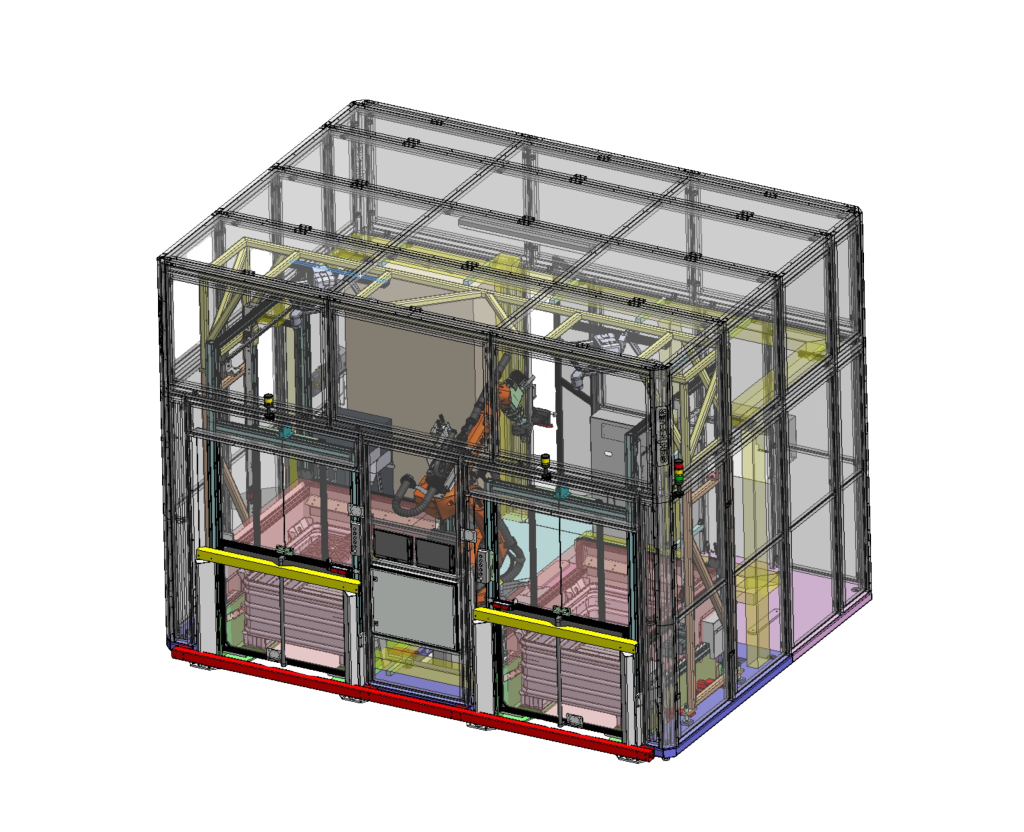
Flexible handling technology
-
Spare parts for Schindler handling technologySpare parts for Schindler handling technology
-
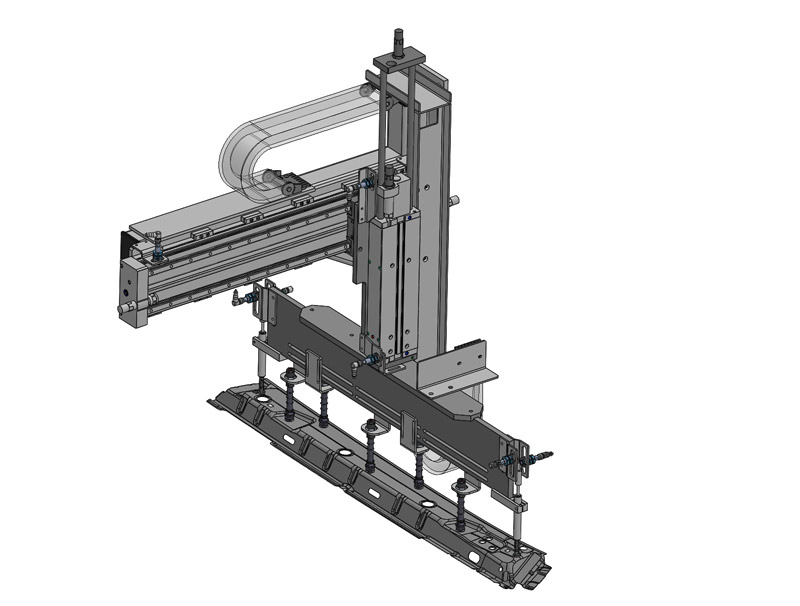
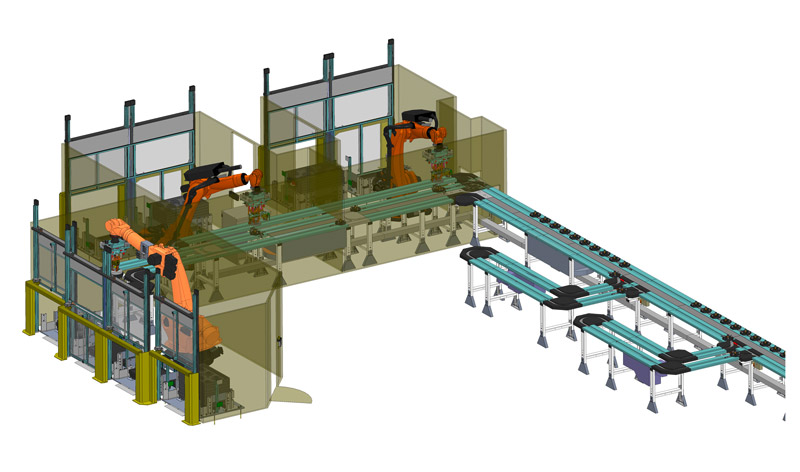
Pick & place handlingPick & place handling
-
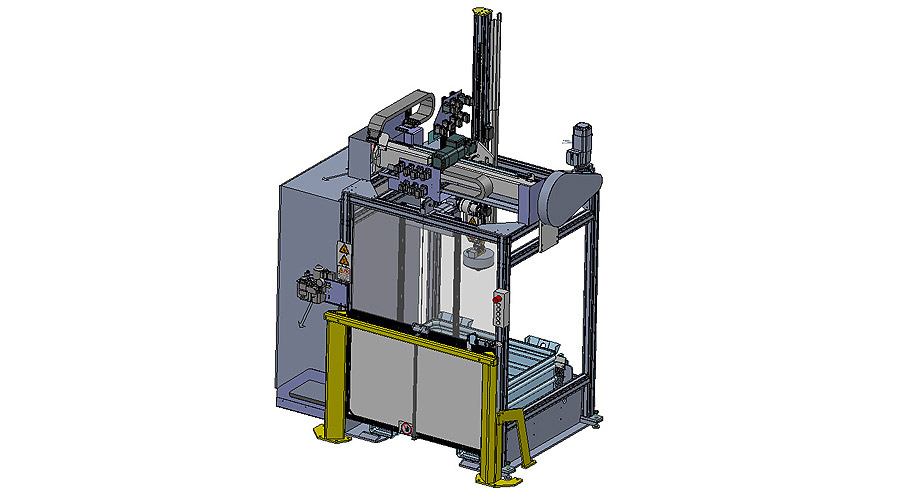
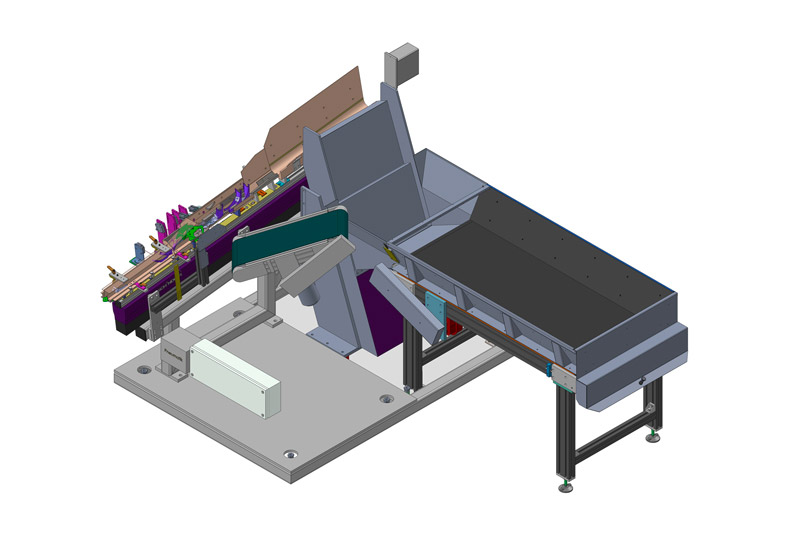
PICKLA unmachined part loadingPICKLA unmachined part loading
-
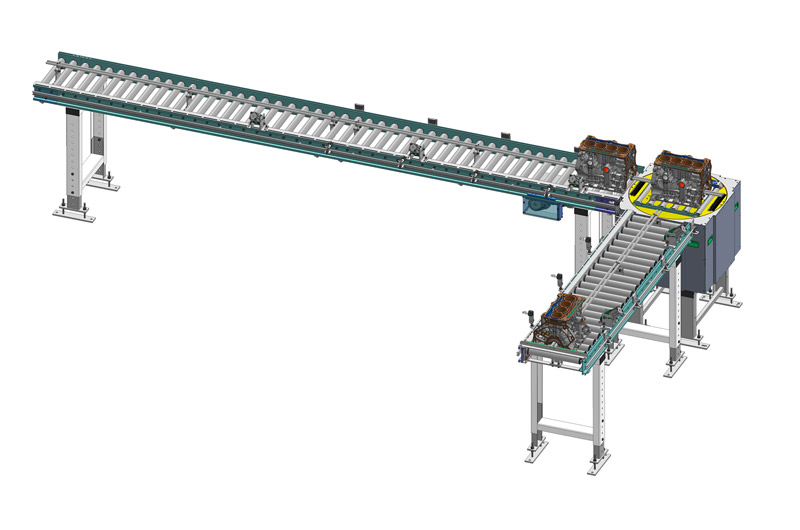
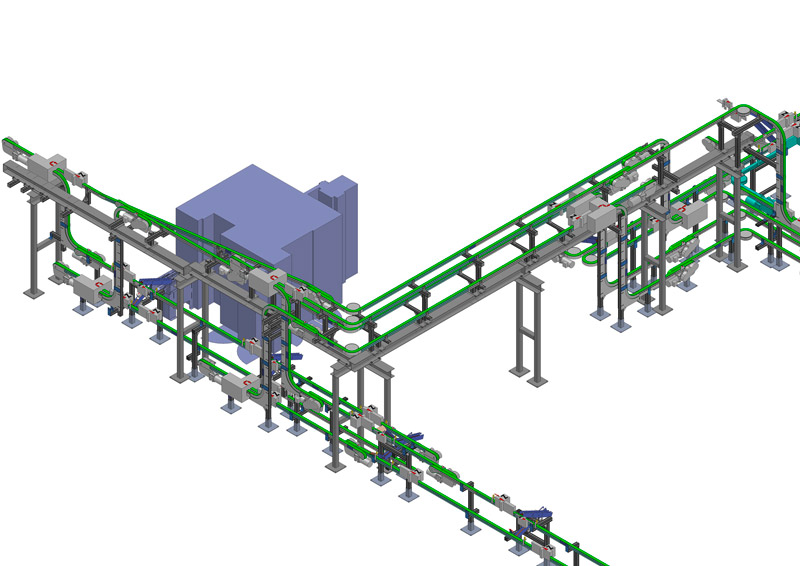
TaxiwaysTaxiways
-
Link chainsLink chains
-
Palletizing systemPalletizing system
-
Pallet transportationPallet transportation