Produkte
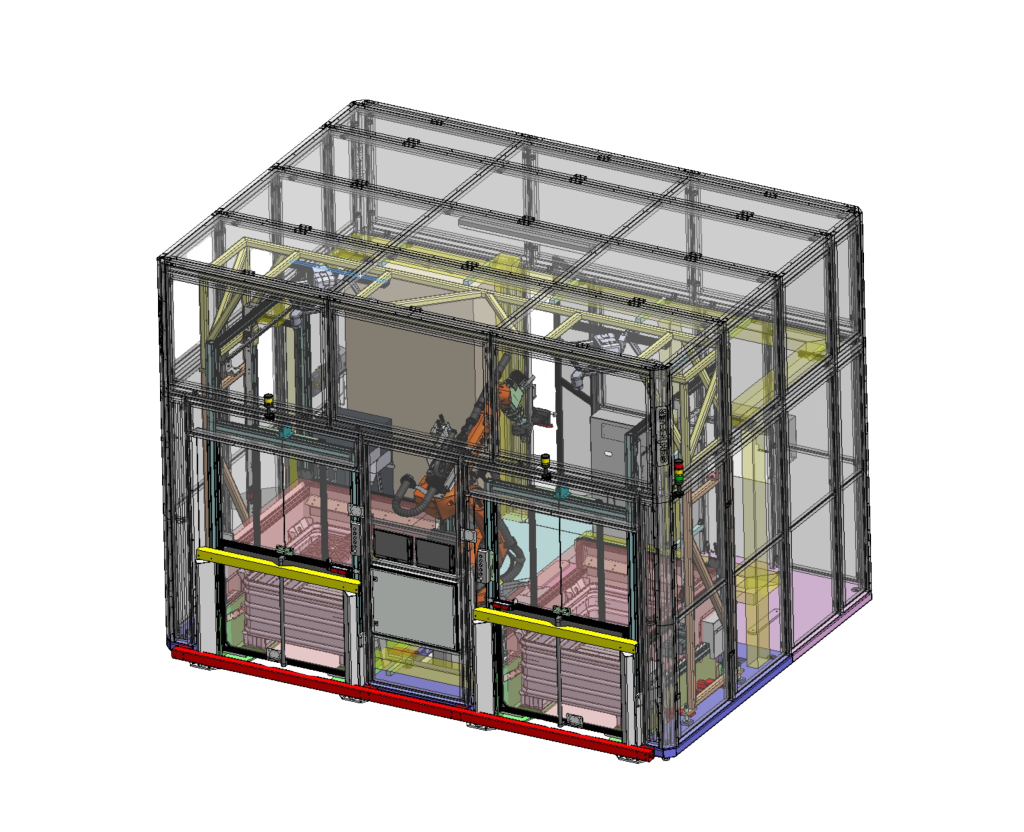
Flexible Handhabungstechnik
-
Ersatzteile für Schindler HandhabetechnikErsatzteile für Schindler Handhabetechnik
-
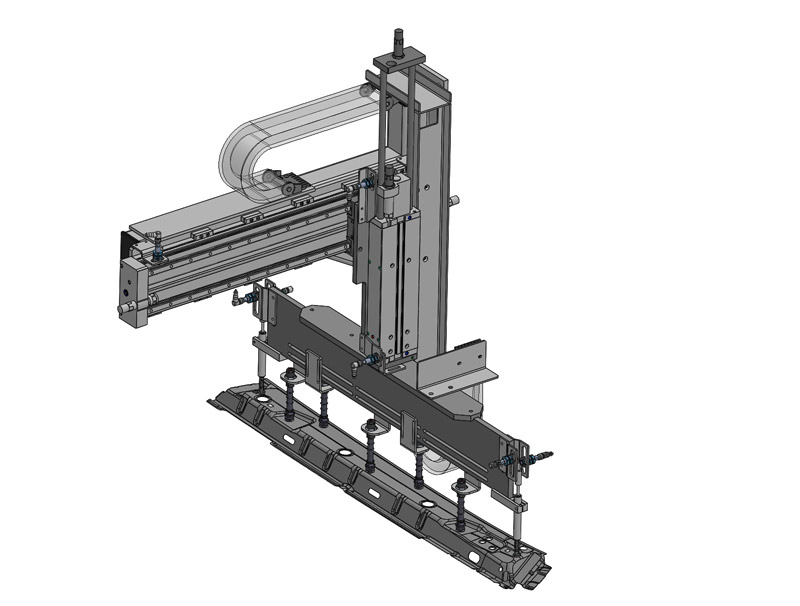
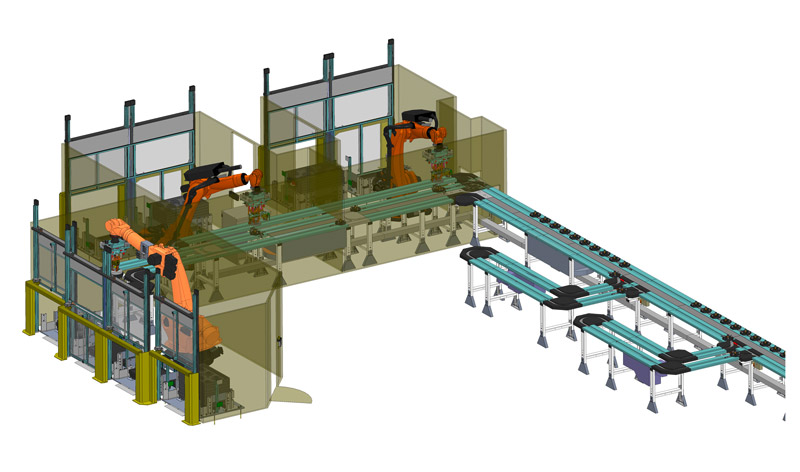
Pick & Place HandlingPick & Place Handling
-
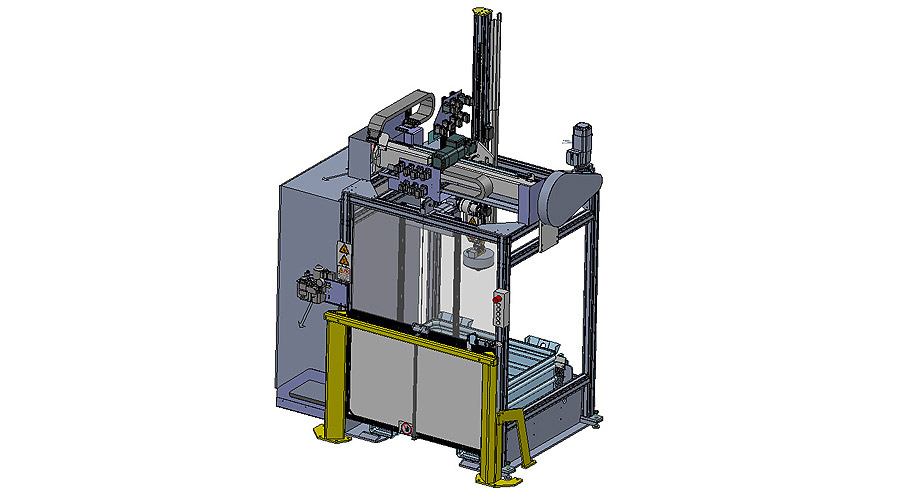
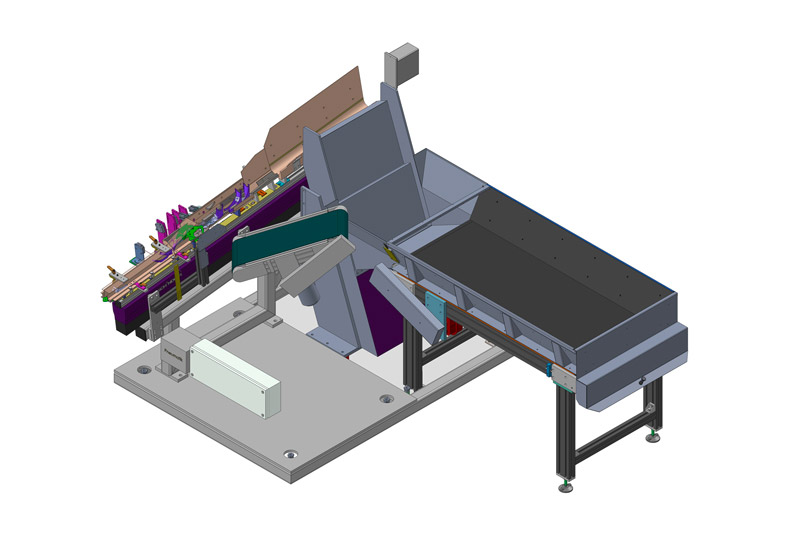
PICKLA RohteilbeladungPICKLA Rohteilbeladung
-
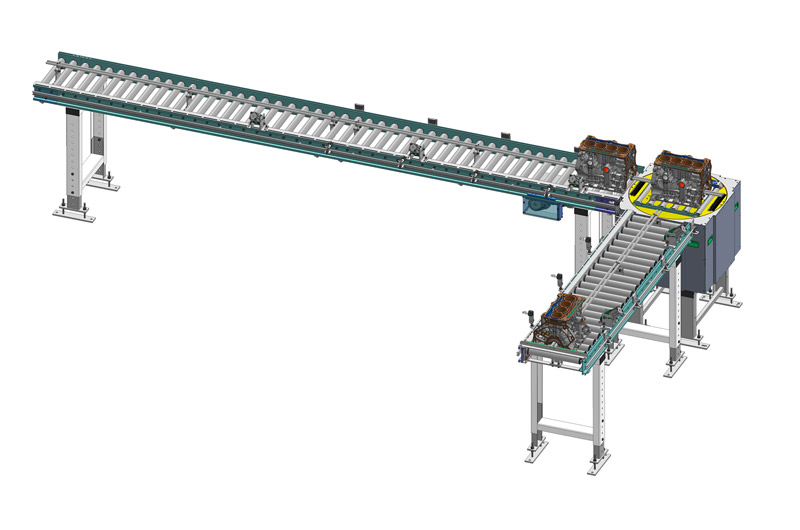
RollbahnenRollbahnen
-
GliederkettenGliederketten
-
PalletiersystemPalletiersystem
-
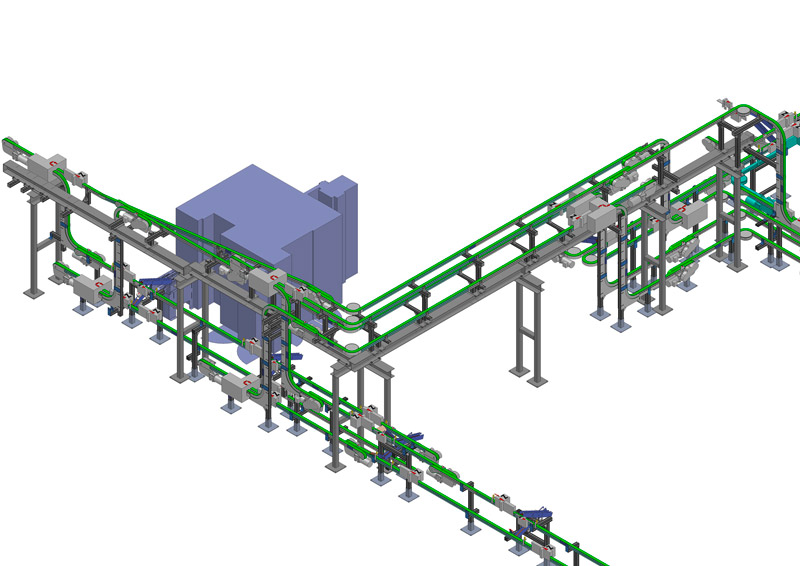
PalettentransportPalettentransport